If biological evolution can produce intelligence ![]() , then evolutionary algorithms should be able to generate artificial intelligence
, then evolutionary algorithms should be able to generate artificial intelligence ![]() , which not only in software, but in physical machines.
, which not only in software, but in physical machines.
The most important thing is, modular and morphologically adaptive robots provide one of the clearest experimental substrates for testing this idea.
Morphology as a First-Class Adaptive Variable
Recent work in robotics increasingly suggests that intelligence does not reside solely in control or perception, but emerges from the tight coupling between body, brain, and environment. A particularly illustrative example is the GOAT robot introduced by Polzin et al.[1]
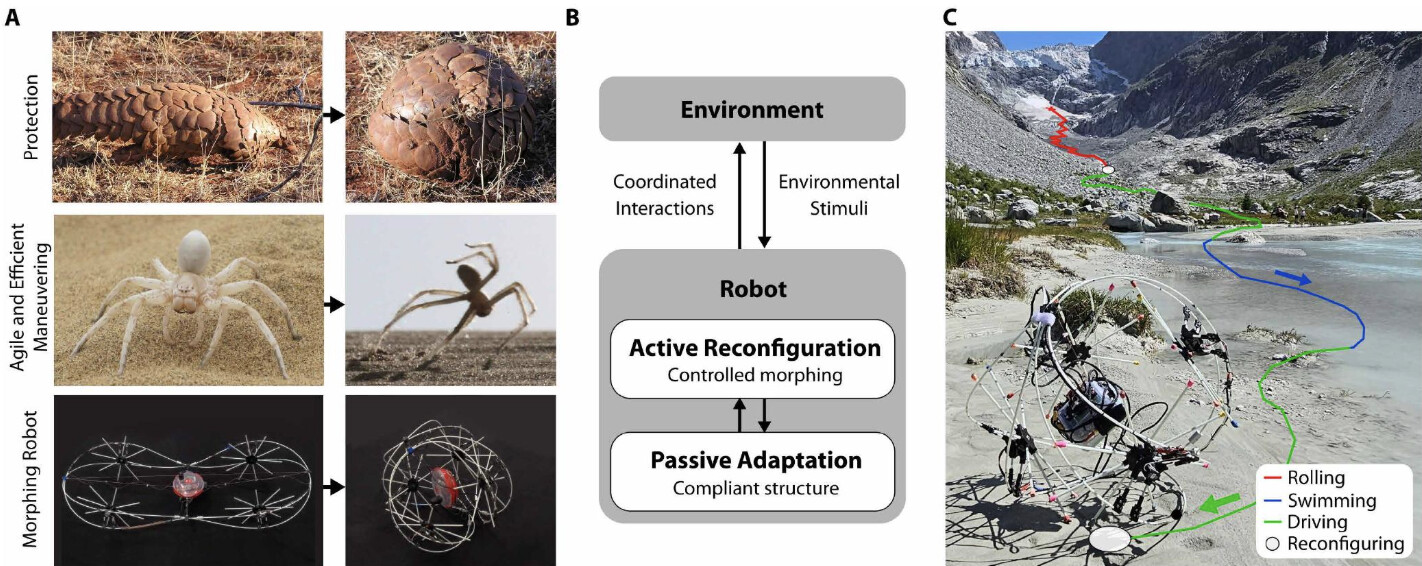
Polzin present GOAT (Good Over All Terrains), a lightweight field robot capable of active morphological reconfiguration combined with passive compliance. Instead of optimizing a controller for a fixed body, the robot reshapes itself to better exploit environmental affordances. Key observations from their large-scale outdoor deployment include:
- A single robot autonomously switching between rover-like and spherical morphologies
- Multiple locomotion modes (driving, rolling, floating) emerging from the same
- Robust traversal of snow, rocks, water, and urban terrain over several kilometers
- Minimal reliance on sensing, planning, or environment-specific models
The key design insight is that changing morphology reshapes the physics of interaction, often reducing the burden on control altogether. In this sense, the body performs part of the computation.
Why Modularity Enables Adaptation
Although GOAT is not modular in a classical “plug-and-play” sense, it exhibits strong functional modularity:
- Structural modules that alter stiffness, aspect ratio, and contact geometry
- Locomotion modules that are activated through shape change rather than controller switching
- Control modules that remain relatively simple because morphology absorbs complexity
This matters because modularity fundamentally increases evolvability. A system whose morphology can change can explore a much larger behavioral space without redesigning control from scratch.
From an evolutionary perspective, modularity is not about convenience, it is about searchability.
The GOAT robot demonstrates what is possible when morphology is allowed to adapt within a robot’s lifetime. But a deeper question remains, How should morphology itself be discovered, designed, and optimized?
Extending the View: Evolution Across Multiple Levels
Gusz Eiben address this question by proposing Multi-Level Evolution (MLE) [2], a framework that explicitly treats robot design as an evolutionary process spanning materials, components, and full machines. Rather than evolving controllers alone, MLE explores:
- Materials with different physical properties
- Components composed of geometry–material combinations
- Robots assembled from these components and evaluated in environments
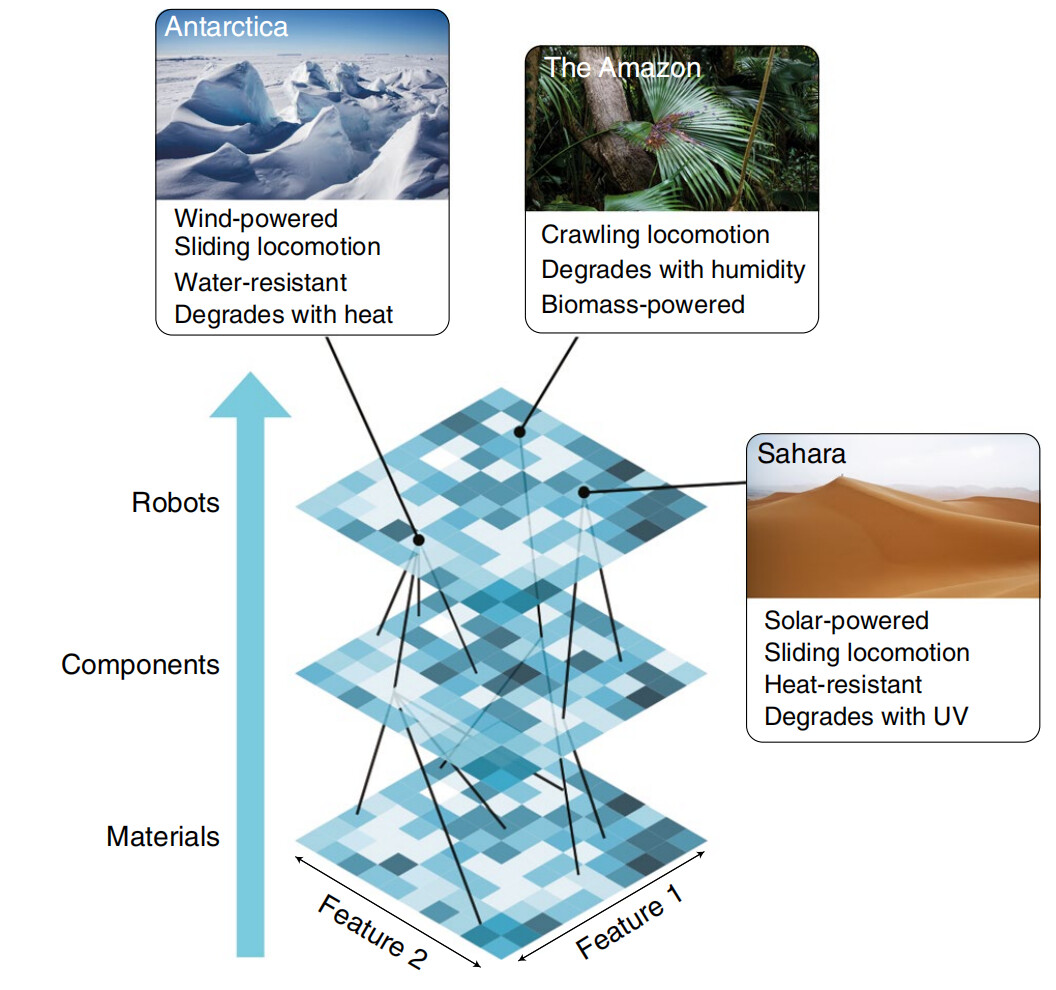
This perspective reframes modularity as a hierarchical evolutionary scaffold. Modularity is not imposed by human designers; it emerges because evolution operates more efficiently when variation is structured across levels.
The key conceptual leap here is that intelligence is constrained by embodiment choices made far below the level of control, when sometimes at the level of materials themselves.
Self-Modeling: When the Body Becomes Unknown
Adaptation is not only about discovering good morphologies—it is also about coping when morphology changes unexpectedly. This is where the classic work of Bongard, Zykov, and Lipson becomes highly relevant [3]. In their 2006 Science paper, they demonstrate a robot that can infer its own body structure through self-directed exploration, build internal self-models, and recover locomotion after damage—without pre-programmed contingency plans.
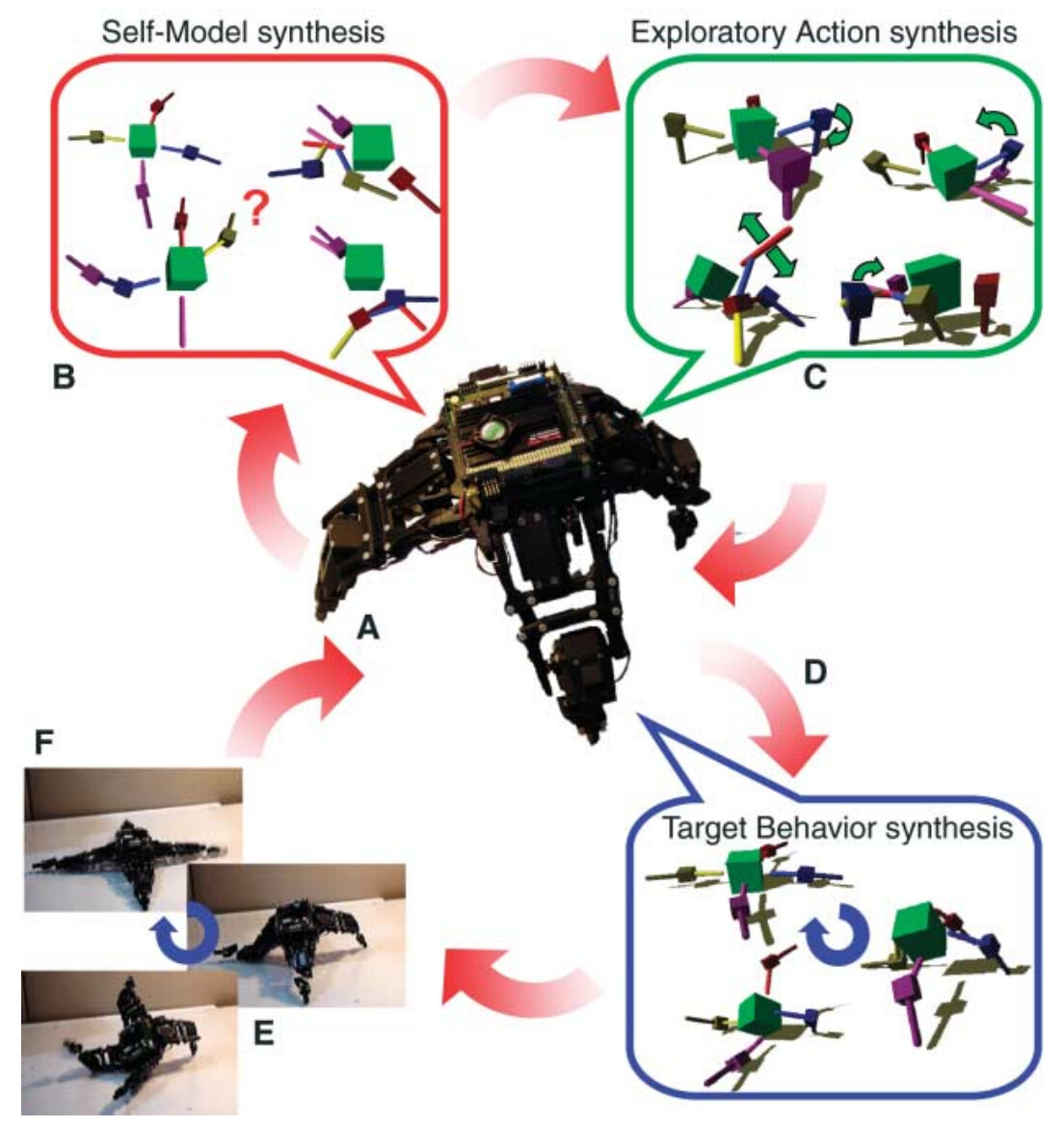
Their robot continuously cycles through:
- Hypothesizing candidate self-models of its own morphology
- Executing actions that maximize disagreement between models
- Refining its internal model based on sensory feedback
- Generating new behaviors using the updated model
When a leg is damaged or partially removed, the robot autonomously discovers this change and compensates with a new gait. The significance here is profound: the robot treats its own body as an object of inference.
Taken together, these three works outline a coherent trajectory. The common thread is clear that intelligence emerges when a system can change its body, understand its body, and exploit its body in interaction with the environment. From this viewpoint, modular robots are not merely flexible machines. They are experimental platforms for studying artificial evolution.
If we restrict AI to optimizing policies over fixed embodiments, we are solving only part of the problem. Biological intelligence did not evolve this way. True artificial intelligence may require systems that can explore morphological variation, adapt embodiment to tasks and environments, and learn and revise internal models of their own bodies. Modular and evolvable robots offer a path toward this vision, that one where intelligence is not programmed, but grown through interaction, adaptation, and evolution.
Why We Need Modular Robots
Modular robots are not merely an engineering convenience, they are a necessary experimental platform for the next stage of robotics and artificial intelligence research.
If intelligence is fundamentally embodied, then fixed-form robots severely limit what we can study, learn, and ultimately evolve. A robot whose body cannot change can only adapt through control, and this constrains both robustness and generality. In contrast, modular and reconfigurable robots allow us to systematically explore how morphology, control, and environment co-determine behavior.
More importantly, modular robots make evolution tractable in the physical world. They introduce structured variation, enable reuse across designs, and create interpretable links between physical form and functional outcome. Without such platforms, evolutionary algorithms remain confined to simulation, disconnected from the realities of matter, uncertainty, and failure.
In this sense, modular robots play a role analogous to model organisms in biology. They are not the final product, but the means by which we discover principles—principles about adaptation, resilience, and the emergence of intelligence through interaction with the physical world.
If we aim to move beyond task-specific machines toward genuinely adaptive artificial agents, then modular robots are not optional.
Modular Robots are essential.
[1] Polzin, M. P., Huber, L., Coros, S., & Hutter, M. (2025). Robotic locomotion through active and passive morphological adaptation in extreme outdoor environments. Science Robotics, 10(97), eadi1234.
[2] Howard, D., Eiben, A. E., Haasdijk, E., & Winfield, A. F. T. (2019). Evolving embodied intelligence from materials to machines. Nature Machine Intelligence, 1, 1–10.
[3] Bongard, J., Zykov, V., & Lipson, H. (2006). Resilient machines through continuous self-modeling. Science, 314(5802), 1118–1121.